Mass, efficiency, tyres, Scx :
Influence of these factors on the range of the EV?
Introduction.
The electric vehicle powertrain has a high efficiency (85 to 90 %) and the capacity to get back the kinetic energy (1 / 2mv ²) during an electric braking phase. From then on, in first approximation, during an acceleration then of return at no speed, the energy consumption should not be linked to the mass. Indeed, for example a vehicle 2X heavier would absorb twice more energy during a phase of acceleration, but would get back it twice more in the braking.
In reality, the frictions due to pneumatics are proportional in the mass. Moreover, a heavier vehicle will ask more power thus will dissipate more losses, the actual efficiency being lower than 100 %. The study aims to quantify the influence of these factors.
Simulations.
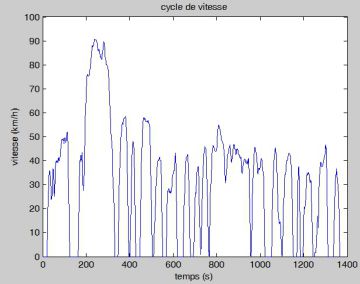
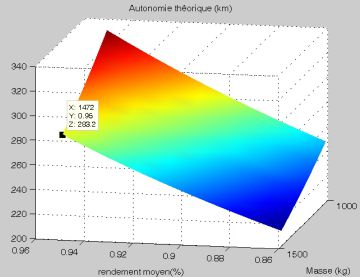
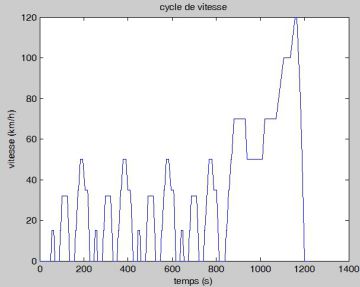
The simulations are based on a Renault ZOE in NECD speed cycle, having a 210 km range (mass =1472kg with driver). For every comparisons, 10 masses and 10 SCx (rep. RRC or efficiencies) are tested, that is 100 simulations, with the same model of vehicle.
According to this model and on this cycle, the gains of autonomy are of 8.3km, that is 4 % of autonomy / 100kg of lightening of mass.
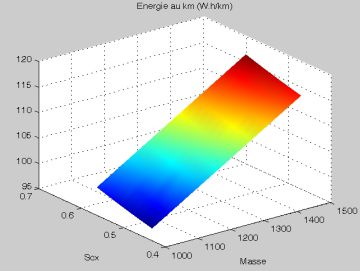
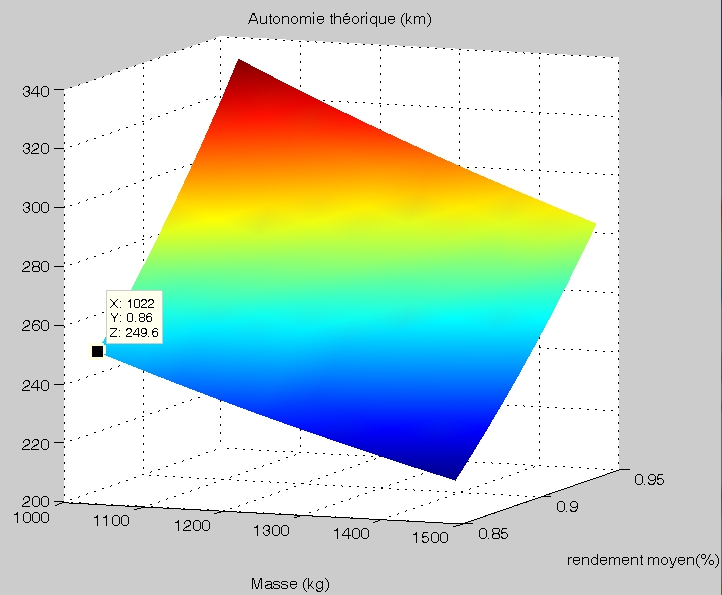
1. Mass Vs Efficiency
On a basis of average efficiency of 86 %, the gain of range is 7.9 km (3.7%) by percentage of efficiency.
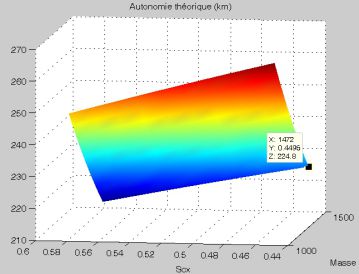
2. Mass Vs SCx
The gain of range is only 1km (0.47%) by point of SCx.
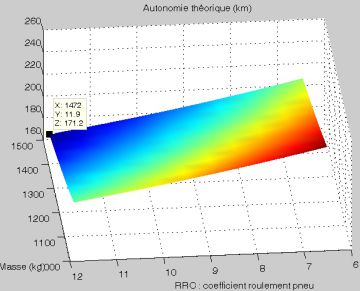
3. Mass Vs RRC
The gain of range raises up to 9 km by efficiency class index . For exemple, the gain is 30 km of range from a A class tyre (on Renault ZOE), and a classical E class tyre.
Conclusion.
The range optimization which can be easily obtained consists in equipping a electric vehicle of energy-saving tires, what is the case of Renault ZOE. The second post of improvement is undoubtedly the mass, with a gain of 4 % of autonomy / 100 kg of lightening, with an improvement of the dynamic performances for a given power.
Authors.
JC Papazian - E. Buriez (Lycée Fourcade).


Electric and hybrid vehicules technology



Réalisations